Continuous Spaces
Reinforcement Learning: Framework
-
Model-based
- requires a known transition and reward model
- essentially apply dynamic programming to iteratively compute the desired value functions and optimal policies using that model
- Examples
- Policy iteration
- Value iteration
-
Model-free
- samples the environment by carrying out exploratory actions and use the experience gained to directly estimate value functions
- Examples
- Monte Carlo Methods
- Temporal-Difference Learning
Dealing with Discrete and Continuous Spaces
- Discretization: Converting a continuous space into a discrete space
- Function Approximation
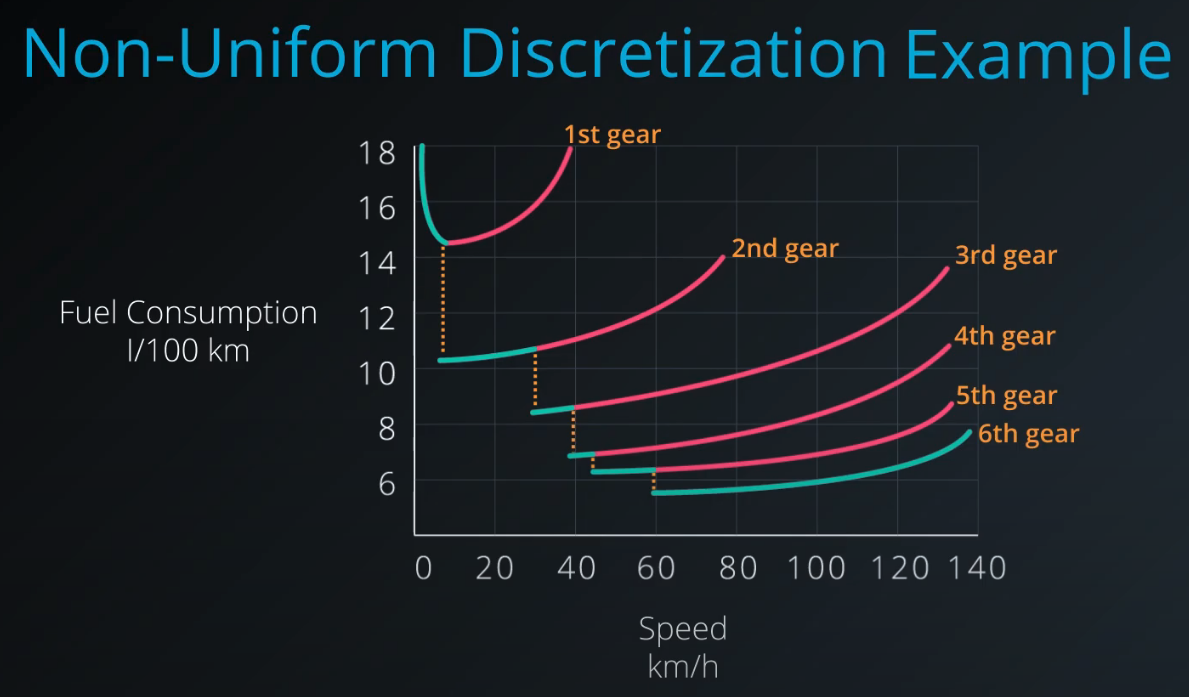
[Non-uniform Discretization, image from Udacity 893]
OpenAI Environments
Discrete(): refers to a discrete spaceBox(): indicates a continuous space
Tile Coding
- Adaptive Tile Coding
- does not rely on a human to specify a discretization ahead of time
- the resulting space is appropriately partitioned based on its complexity
Coarse Coding
- Generalization
- Narrow generalization
- Broad generalization
- Asymmetric generalization
- Redial Basis Functions
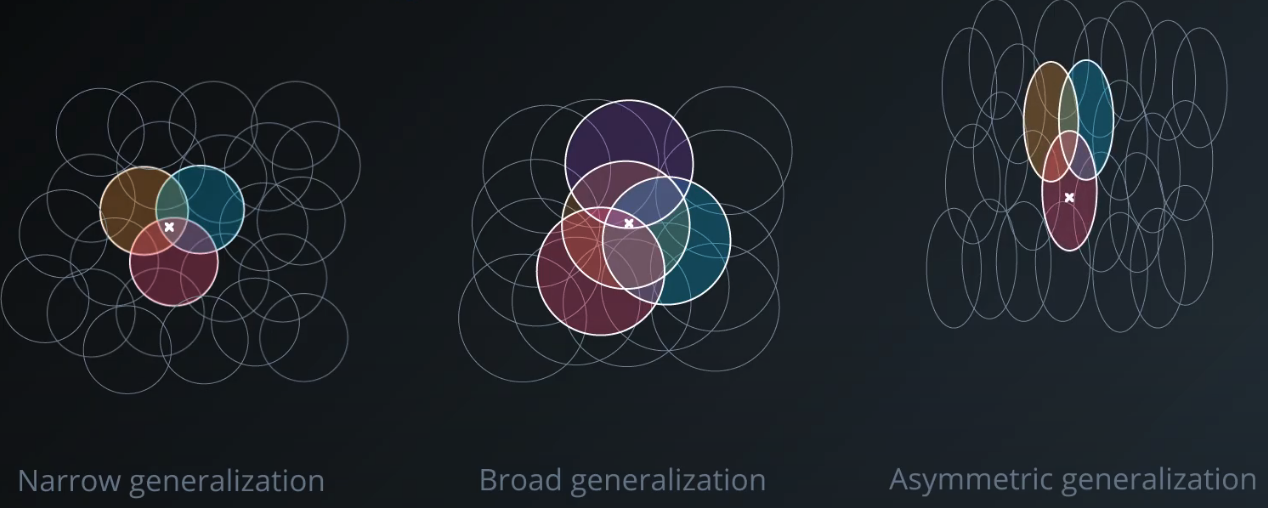
[Coarse Coding, image from Udacity 893]
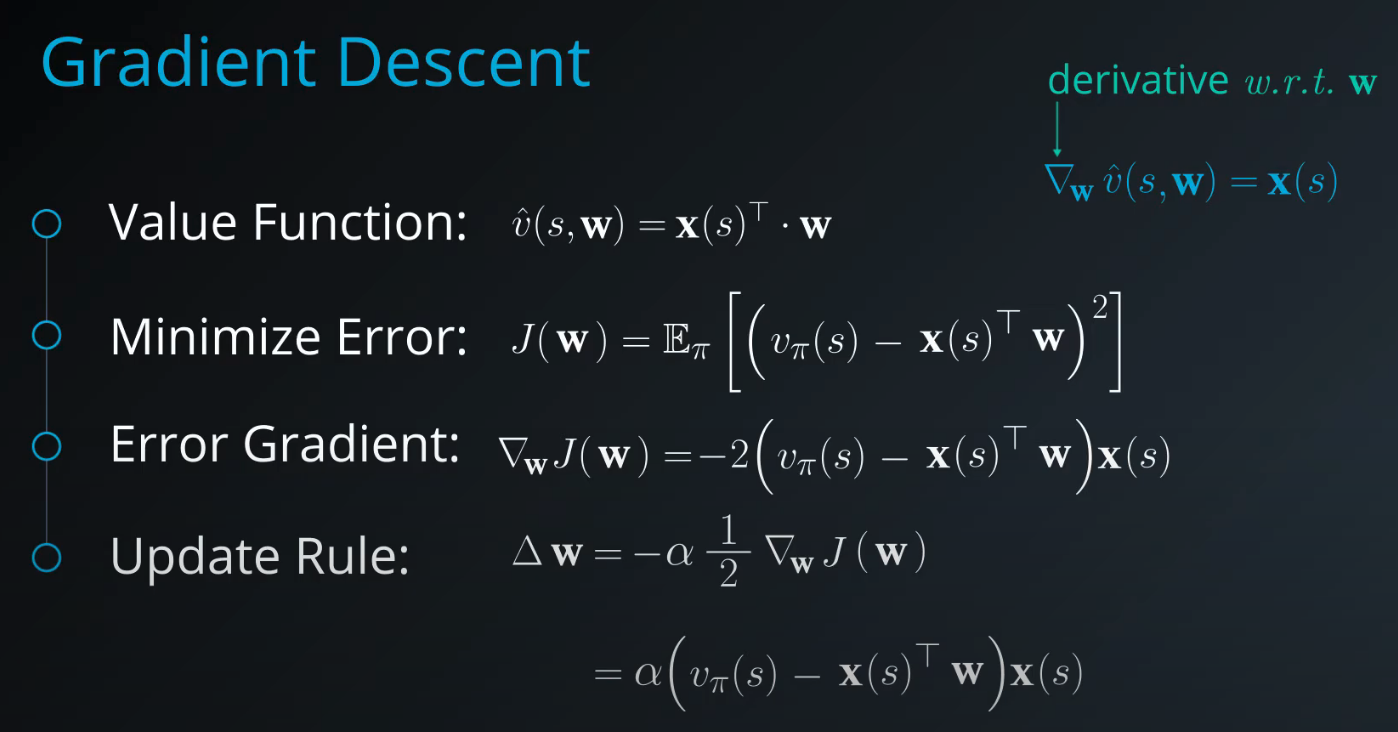
Function Approximation
-
State value approximation
- linear function approximation: $\hat{v}(s,w) = x(s)^T \cdot w$
- Goal: Minimize Error
- Use Gradient Descent: $\nabla_w \hat{v}(s, w) = x(s)$
-
Action value approximation
[Linear Function Approximation]