Linear Algebra
Table of Contents
- Vector
- Determinant
- Dot products
- Cross products
- Cramer’s rule
- Linear transformations
- Matrix vector multiplication
- Matrix multiplication
- Change of basis
- Eigenvectors and eigenvalues
- Abstract vector spaces
- Questions
- Glossary
- References
Vector
- Imagine we have a two dimensional space composed of x and y axis, and their intersection called origin (0).
- $\begin{bmatrix}1 \\2 \end{bmatrix}$ : The coordinate of a vector is a pair of numbers which gives instructions to tell the vector how to get from the origin of the vector to the tip of the vector.
- The first number tells you how far to walk on the x-axis
- After that, the second number tells you how far to walk parallel to the y-axis
- To differentiate vectors from points, the convention is to write these two numbers vertically in a square bracket.
- Every pair of numbers is associated with one and only one vector, vice versa
- Vectors, what even are they? 3'- 4'
Determinant
2-D
- $A = \begin{bmatrix}a&b \\c&d \end{bmatrix}$
- Determinant of $A$: $det(A)$
- Numerically
- a scalar value that can be computed from the elements of a square matrix and measures the scaling of linear transformation described by the matrix
- $det(A)= ad-bc$
- Geometrically
- $det(A)$:the area scaling factor of the linear transformation
- $\lvert det(A) \rvert > 1$, increase the area by a factor of 5
- 0< $\lvert det(A) \rvert < 1$: squish down area
- Zero determinant: when $det(A) =0$, the transformation squishes down the area to a line or a point
- $det(A) < 0$: the orientation of space is inverted (space is inverted. The basis vector $\vec{i}$ is now on the left side of $\vec{j}$)
3-D
- $B = \begin{bmatrix}u_1&v_1&w_1 \\u_2&v_2&w_2 \\u_3&v_3&w_3 \end{bmatrix}$
- Numerically:
- $det(B)$: the volume scaling factor of the linear transformation described by the matrix
- $det(B) = u_1(v2w3-w2v3)-v_1(u_2w_3-w_2u_3)+w_1(u_2v_3-v_2u_3)$
- Geometrically
- $det(B) < 0$: Right finger rule no longer fits
- index finger: points to the direction of $\vec{i}$
- middle finger: points to the direction of $\vec{j}$
- thumb: points to the direction of $\vec{k}$
- $det(B) < 0$: Right finger rule no longer fits
Dot products
-
Two vectors of the same dimension
-
$\vec{v}$ = $\begin{bmatrix}1 \\2 \end{bmatrix}$
-
$\vec{w}$ = $\begin{bmatrix}3 \\4 \end{bmatrix}$
-
-
Order: doesn’t matter
-
Numerically
- Pair the coordinates of multiply them together and add the result
- $\begin{bmatrix}1 \\2 \end{bmatrix}$ $\cdot$ $\begin{bmatrix}3 \\4 \end{bmatrix}$ = 1 $\cdot$ 3+ 2 $\cdot$ 4 = 11
-
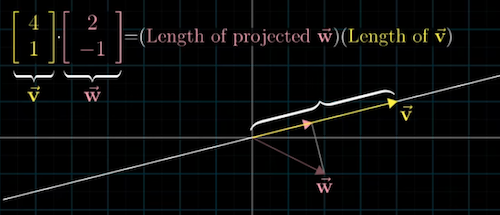
Geometrically
- Project $\vec{w}$ onto the line passing through the origin on the tip of $\vec{v}$
- $\vec{v}$ $\cdot$ $\vec{w}$ = (length of projected $\vec{w}$) $\cdot$ (length of projected $\vec{v}$)
- Dot product vs Directions
- $\vec{v}$ $\cdot$ $\vec{w}$> 0: vectors are pointing to similar directions
- $\vec{v}$ $\cdot$ $\vec{w}$< 0: vectors are pointing to opposing direction
- $\vec{v}$ $\cdot$ $\vec{w}$ = 0: vectors are perpendicular
-
Duality: natural-but-surprising correspondence
- Matrix vector product:
[$u_x$ $u_y$] $\begin{bmatrix}x \\y \end{bmatrix}$ = $u_x$ $\cdot$ $x$ + $u_y$ $\cdot$ $y$ - Dot product:
$\begin{bmatrix}u_x \\u_y \end{bmatrix}$ $\cdot$ $\begin{bmatrix}x \\y \end{bmatrix}$ = $u_x$ $\cdot$ $x$ + $u_y$ $\cdot$ $y$
- Matrix vector product:
Cross products
-
The standard basis vectors $\vec{i}$, $\vec{j}$, and $\vec{k}$
-
Two vectors of the same dimension
-
$\vec{v}$ = $\begin{bmatrix}v_1 \\v_2\\v_3 \end{bmatrix}$
-
$\vec{w}$ = $\begin{bmatrix}w_1 \\w_2 \\w_3\end{bmatrix}$
-
-
Order: matters
-
Cross products
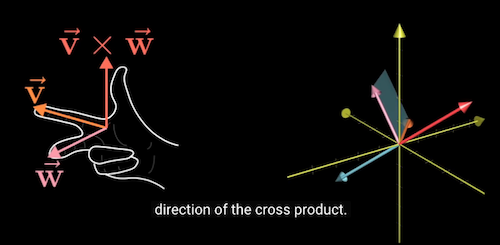
- $\vec{p}$ = $\vec{v}$ $\times$ $\vec{w}$
- $\vec{p}$ is a vector that is perpendicular to both $\vec{v}$ and $\vec{w}$ and thus normal to the plane containing them
-
$\vec{p}$ directions
- $\vec{p}$ > 0: when $\vec{v}$ is on the right side of $\vec{w}$
- $\vec{p}$ < 0: when $\vec{v}$ is on the left side of $\vec{w}$
-
Numerically
- $\begin{bmatrix}v_1 \\v_2\\v_3 \end{bmatrix}$ $\times$ $\begin{bmatrix}w_1 \\w_2 \\w_3\end{bmatrix}$ = ($v_2w_3 -w_2v_3)\vec{i}$ + ($v_3w_1$ - $v_1w_3)\vec{j}$ + ($v_1w_2$ - $v_3w_1)\vec{k}$
-
Geometrically
- The positive area of the parallelogram having $\vec{v}$ and $\vec{w}$ as sides
- The length of $\vec{p}$ = the area of parallelogram defined by $\vec{v}$ and $\vec{w}$
- The direction of $\vec{p}$ is defined using the Right Hand Rule
- index finger: points to the direction of $\vec{v}$
- middle finger: points to the direction of $\vec{w}$
- thumb: points to the direction of $\vec{p}$
Cramer’s rule
- Cramer’s rule expresses the solution in terms of the determinants of the (square) coefficient matrix and of matrices obtained from it by replacing one column by the column vector of right-hand-sides of the equations. It is named after Gabriel Cramer
- Consider a system of linear equation
-
$ax + by =e$
$cx+dy=f$ -
$\frac{e-ax}{b}=\frac{f-cx}{a}$; $x = \frac{ed-bf}{ad-bc}$
-
$\frac {e-by} {a} = \frac{f-dy}{c}$; $y = \frac{af-ec} {ad=bc}$
- Matrix Equation
-
$\begin{bmatrix}a&b \\c&d \end{bmatrix} \begin{bmatrix}x \\y \end{bmatrix} = \begin{bmatrix}e \\f \end{bmatrix}$
-
$x = \frac { \begin{array}{| cc |} e&b\\ f&d\end{array} } { {\begin{array}{|cc|} a&b\\c&d\end{array} } }$
-
$y = \frac { \begin{array}{|cc|} a&e\\c&f\end{array} } { {\begin{array}{|cc|} a&b\\c&d\end{array} } }$
Linear transformations
What is linear transformation?
- A function that takes an input vector and generates an output vector
- The word ‘transformation’ suggests that we think using movement
- The word ‘Linear’ suggests all spatial grid lines (for visualizing the coordinate system) must remain parallel and evenly spaced (not curvy), and the origin remains fixed (not moving).
What is a shear matrix?
A shear matrix is an elementary matrix that represents the addition of a multiple of one row or column to another.
- $\begin{bmatrix}1&s \\0&1 \end{bmatrix}$
- $\begin{bmatrix}1&0 \\s&1 \end{bmatrix}$
How is matrix useful?
- Computer graphics
- Robotics: e.g. rotation
- Solve system equations: Linear system
Matrix vector multiplication
- Numerically:
- $\begin{bmatrix}a&b \\c&d \end{bmatrix} \begin{bmatrix}x \\y \end{bmatrix} = x\begin{bmatrix}a \\c \end{bmatrix} + y\begin{bmatrix}b \\d \end{bmatrix} = \begin{bmatrix}{ax+by} \\ {cx+dy} \end{bmatrix}$
- Geometrically: apply a transformation to a vector
- Think of the columns of a matrix as transformed basis vectors $\begin{bmatrix}a \\c \end{bmatrix}$ and $\begin{bmatrix}b \\d \end{bmatrix}$
- The linear trans result is the linear combination of the transformed basis vectors
Matrix multiplication
- Numerically: Right to left
- $\begin{bmatrix}a&b \\c&d \end{bmatrix}\begin{bmatrix}e&f \\g&h \end{bmatrix} =\begin{bmatrix}{ae+bg}&{af+bh} \\ {ce+dg}&{cf+dh}\end{bmatrix}$
- Step1: $\begin{bmatrix}a&b \\c&d \end{bmatrix}\begin{bmatrix}e \\g \end{bmatrix} = e\begin{bmatrix}a \\c \end{bmatrix} + g\begin{bmatrix}b \\d \end{bmatrix} = \begin{bmatrix}{ae+bg} \\ {ce+dg} \end{bmatrix}$
- Step 2: $\begin{bmatrix}a&b \\c&d \end{bmatrix}\begin{bmatrix}f \\h \end{bmatrix} = f\begin{bmatrix}a \\c \end{bmatrix} + h\begin{bmatrix}b \\d \end{bmatrix} = \begin{bmatrix}{af+bh} \\ {cf+dh} \end{bmatrix}$
- Geometrically:
- $f(g(x))$
- Composition: apply one transformation $f$ after another $g$
- Order: matters $M_1M_2 \ne M_2M_1$
- Associativity: $(AB)C=A(BC)$, meaning applying transformation C, B, and A
Change of basis
- Translate between two coordinate systems
- An inverse transformation $A^{-1}$ means: reverse the transformation
- $A^{-1}MA$
- $M$: a transformation in coordinate system P
- $A^{-1}$ and $A$: mathematical sort of empathy
- $A^{-1}MA$: mathematical product in coordinate system Q
Eigenvectors and eigenvalues
-
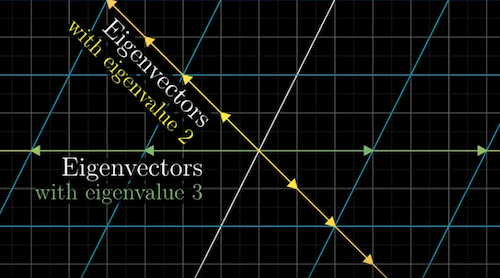
Eigenvector: a vector that stays on its own span (the line passing through the origin and the tip of the vector) during a matrix transformation, unlike other vectors that are knocked off their spans during transformation
-
Eigenvalue: The factor by which the eigengectors is stretched or squished
-
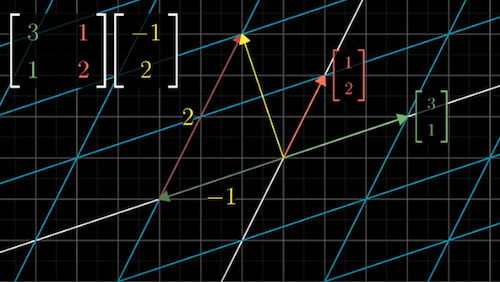
e.g. Matrix $A = \begin{bmatrix}3&1 \\0&2 \end{bmatrix}$ Eigenvector $\vec{v}$ = $\begin{bmatrix}-1 \\1 \end{bmatrix}$, eigenvalue of $\vec{v}$ is 2
-
The axis of a 3-D rotation: the span of an eigenvector, with eigenvalue equal to 1 (no stretching or squishing during rotation)
-
Eigenbasis: a set of basis vectors which are also eigenvectors
- useful for matrix operations,
- e.g. To calculate $\begin{bmatrix}3&1 \\0&2 \end{bmatrix}^{100}$, change the basis vector to eigenbasis system $\begin{bmatrix}1&-1 \\0&1 \end{bmatrix}$
- $\begin{bmatrix}1&-1 \\0&1 \end{bmatrix}^{-1}$ $\begin{bmatrix}3&1 \\0&2 \end{bmatrix}$ $\begin{bmatrix}1&-1 \\0&1 \end{bmatrix}$ = $\begin{bmatrix}3&0 \\0&2 \end{bmatrix}$
-
How to calculate the eigenvalue of a matrix?
- Matrix-vector multiplication $A\vec{v} = \lambda\vec{v}$ Scalar multiplication
- Change the scalar multiplication to matrix multiplication ($I\vec{v}$) scaled by a factor $\lambda$
- $A\vec{v} = \lambda I \vec{v}$; matrix-vector multiplication on both sides
- $I = \begin{bmatrix}1 &0 \\0&1 \end{bmatrix}$, the identity matrix with ones in the diagonal
- $(A-\lambda I)\vec{v} = 0$
- For non-zero $\vec{v}$, the transformation associated with the matrix has to be squished down to a lower dimension (squishification), which corresponds to a zero determinant of the matrix $det(A-\lambda I) = 0$
- e.g.
-
For matrix $A = \begin{bmatrix}3&1 \\0&2 \end{bmatrix}$
-
$\biggl(\begin{bmatrix}3&1 \\0&2 \end{bmatrix} - \lambda\begin{bmatrix}1 &0 \\0&1 \end{bmatrix}\biggr)\vec{v}=0$
-
$det \biggl(\begin{bmatrix}{3-\lambda}&1 \\0&{2-\lambda } \end{bmatrix}\biggr) = 0$
-
$(3-\lambda)(2-\lambda)=0$
-
$\lambda$ can only be an eigenvalue, therefore, $\lambda=2$ or $\lambda=3$, which are the eigenvectors of matrix $A$
-
Abstract vector spaces
- Function: a type of vectors
Questions
-
What does a determinant of 0 mean for a matrix transformation?
- $det(A)=0$
- The matrix is squished down to a lower dimension
-
What kind of matrices have no eigenvalues?
- Non-square matrix
- A skew-symmetric matrix (or anti-symmetric matrix) where $A^T=-A$
-
What properties do linear transformations have?
- Linear transformations preserve addition and scalar multiplication
- Preserving additivity: The result of adding two vectors and applying transformation to the sum is the same as adding the transformed vectors.
$L(\vec{v}+\vec{w})=L(\vec{v})+L(\vec{w})$ - Preserving scaling: when you scale a vector by a scaler and then apply the transformation is the same as scaling the transformed vector.
- These properties make it possible to represent any vector and do matrix multiplications. $L(c\vec{v})=cL(\vec{v})$
Glossary
- Column space: all the linear combinations of the column vectors Video by Sal Khan
- Identity transformation: the transformation that does nothing
- Gaussian elimination
- Inverse matrices: the inverse transformation in geometry (clockwise-counterclockwise, rightward shear – leftward shear) $A^{-1}*A^1=\begin{bmatrix}0&1 \\1&0 \end{bmatrix}$
- Rank: the number of dimensions in the output of a transformation (e.g. Rank 2: All vectors after a transformation land on a 2-D plane)
- Null space (kernel): the space of all vectors becoming null
- Row echelon form
- Span: the set of all linear combinations of two vectors.
- Symmetric matrix: $A^T=A$
- Skew-symmetric matrix $A^T=-A$
Read More
- Essence of linear algebra
- Cross product introduction
- Essence of linear algebra
- MIT Eigen
- Eigenvalues and Eigenvectors
- KSmith-EigenValues
- Shears and one directional scaling
- Mary L Boas, John Wiley and Sons, 3rd Ed, 2006. Linear Algebra - Chapter 3.
- Introduction to Linear Algebra by Gilbert Strang, Wellesley-Cambridge Press, 5th Ed, 2016.
- Introduction to Applied Linear Algebra – Vectors, Matrices, and Least Squares, by Stephen Boyd and Lieven Vandenberghe