RL Problem
The Settings
- Agent’s Actions: Goal is to maximize expected cumulative reward
- Env
- Rewards
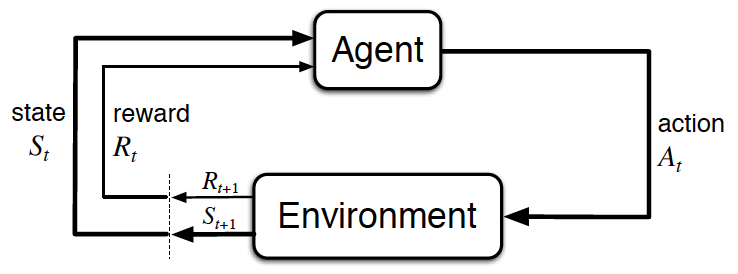
The agent-environment interaction in rl (Source: Sutton and Barto, 2017)
- The reinforcement learning (RL) framework is characterized by an agent learning to interact with its environment.
- At each time step, the agent receives the environment’s state (the environment presents a situation to the agent), and the agent must choose an appropriate action in response. One time step later, the agent receives a reward (the environment indicates whether the agent has responded appropriately to the state) and a new state.
- All agents have the goal to maximize expected cumulative reward, or the expected sum of rewards attained over all time steps.
Episodic vs. Continuing Tasks
A task is an instance of the reinforcement learning (RL) problem.
- Episodic task: tasks with a well-defined starting and ending point.
- In this case, we refer to a complete sequence of interaction, from start to finish, as an episode
- Episodic tasks come to an end whenever the agent reaches a terminal state
- About past life regression and reincarnation 😳
- Game
- Continuing Tasks: interaction continues for ever, without limit 😬
- Stocks
The Reward Hypothesis
All goals can be framed as the maximization of (expected) cumulative reward.
- Problem of sparse rewards: when the reward signal is largely uninformative
- Cumulative reward
- The goal of the agent at time step T: maximize accumulative reward
- The robot learns to move a bit slowly to sacrifice a little bit of reward but it will payoff because it will avoid falling for longer and collect higher accumulative reward
- Discounted return: we give a discount rate $\gamma \in (0,1)$ to Reward at each step to avoid having to look too far into the limitless future
- For larger values of $\gamma$, the agent cares more about the distant future.
- Smaller values of $\gamma$ result in more extreme discounting
- $\gamma = 0$: agent only cares about most immediate reward, not caring about the future
- $\gamma = 1$: the return is not discounted. This becomes a pretty difficult task if the future is limitless
- Most relevant for selection of actions in continuing tasks
- Note: with or without the discount rate, the goal of agent is always the same
Markov Decision Process
A (finite) Markov Decision Process (MDP) is defined by:
-
- a (finite) set of Action $A$: space of all possible actions available to the agent
-
- a (finite) set of States $S$: all nonterminal states
-
- at a dicount rate $\gamma \in (0,1)$
- $G_t = R_{t+1} + \gamma R_{t+2} + {\gamma}^2 R_{t+3} +…$
- A common choice: $\gamma = 0.9$
-
- a (finite) set of Rewards $\gamma $
-
- the one-step dynamics of the environment: $p(s',\gamma |s,a) = \Bbb{P}(S_{t+1} = s', R_{t+1} =\gamma | S_t =s, A_t = a)$
The agent knows 1-3 and does not know 4 and 5. Therefore, the agent needs to learn from interaction to accomplish its goal.
A MDP Problem
For a can-picking recycling robot:
-
He\gamma e is a method that the environment could use to decide the state and reward, at any time step.
- $A$:
- Search cans
- Wait
- Recharge
- $S$:
- High battery
- Low battery
- $A$:
-
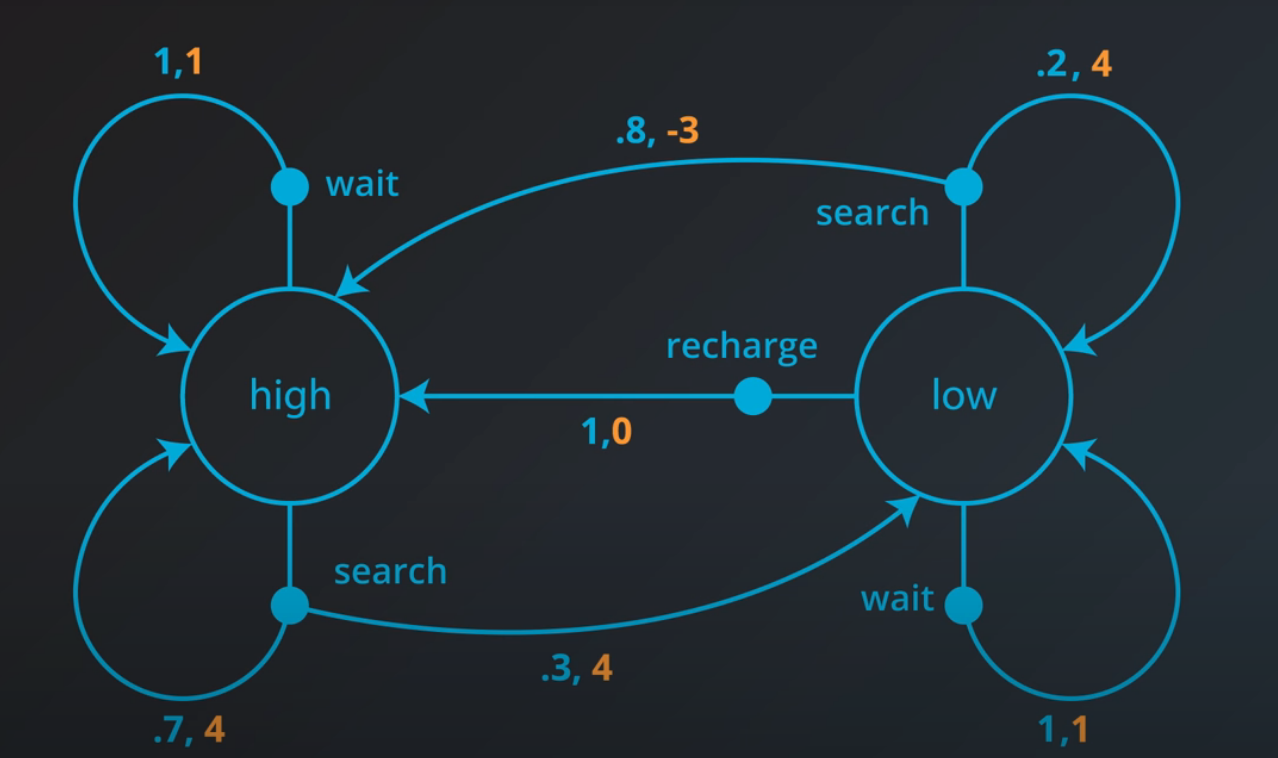
Say at an arbitrary time step t, the state of the robot’s battery is high ($S_t = \text{high}$). Then, in response, the agent decides to search ($A_t = \text{search}$). You learned in the previous concept that in this case, the environment responds to the agent by flipping a theoretical coin with 70% probability of landing heads.
- If the coin lands heads, the environment decides that the next state is high ($S_{t+1} = \text{high}$), and the reward is $(R_{t+1} = 4$).
- If the coin lands tails, the environment decides that the next state is low ($S_{t+1} = \text{low}$), and the reward is $(R_{t+1} = 4)$.
- At an arbitrary time step $t$, the agent-environment interaction has evolved as a sequence of states, actions, and rewards. When the environment responds to the agent at time step $t+1$,
- it considers only the state and action at the previous time step ($S_t, A_t$)
- it does not consider any of ${ R_0, \ldots, R_t }$
-
For the case that $S_t = \text{high}$, and $A_t = \text{search}$, when the environment responds to the agent at the next time step, - with 70% probability, the next state is high and the reward is 4. In other words, $p(high,4|high,search) = \Bbb{P}(S_{t+1} = high, R_{t+1} = 4 | S_t = high, A_t = search) = 0.7$
-
Consider the following probabilities,
- which of the above probabilities is equal to 0? (1,3,5)
- Which of the above probabilities is equal to 1? (2,4)
- (1) $p(\text{low}, 1|\text{low},\text{search})$
- (2) $p(\text{high}, 0|\text{low},\text{recharge})$
- (3) $p(\text{high}, 1|\text{low},\text{wait})$
- (4) $p(\text{high}, 1|\text{high},\text{wait})$
- (5) $p(\text{high}, 1|\text{high},\text{search})$
OpenAI Gym
Quiz
- Consider an agent who would like to learn to escape a maze. Which reward signals will encourage the agent to escape the maze as quickly as possible?
Who is Markov?
Andrey Markov (1856–1922) was a Russian mathematician best known for his work on stochastic processes. A primary subject of his research later became known as Markov chains and Markov processes.

Andrey Markov, image from Wikipedia