RL Solutions
Policies
-
A deterministic policy: a mapping $\pi: S \to A$
- For each state $s \in S$, it yields the action $a \in A$ that the agent will choose while in state $s$.
- input: state
- output: action
- Example
- $\pi(low) = recharge$
- $\pi(high) = search$
-
A stochastic policy: a mapping $\pi: S \times A \to [0,1]$
-
For each state $s \in S$ and action $a \in A$, it yields the probability $\pi(a|s)$ that the agent chooses action $a$ while in state $s$.
-
input: state and action
-
output: probability that the agent takes action $A$ while in state $S$
-
$\pi(a|s) =\Bbb{P}(A_t =a | S_t = s) $
-
Example
- low
- $\pi(recharge | low) = 0.5$
- $\pi(wait | low) = 0.4$
- $\pi(search | low) = 0.1$
- high
- $\pi(search | high) = 0.6$
- $\pi(wait | high) = 0.4$
- low
-
Gridworld Example
In this gridworld example, once the agent selects an action,
- it always moves in the chosen direction (contrasting general MDPs where the agent doesn’t always have complete control over what the next state will be),
- the reward can be predicted with complete certainty (contrasting general MDPs where the reward is a random draw from a probability distribution).
- the value of any state can be calculated as the sum of the immediate reward and the (discounted) value of the next state.
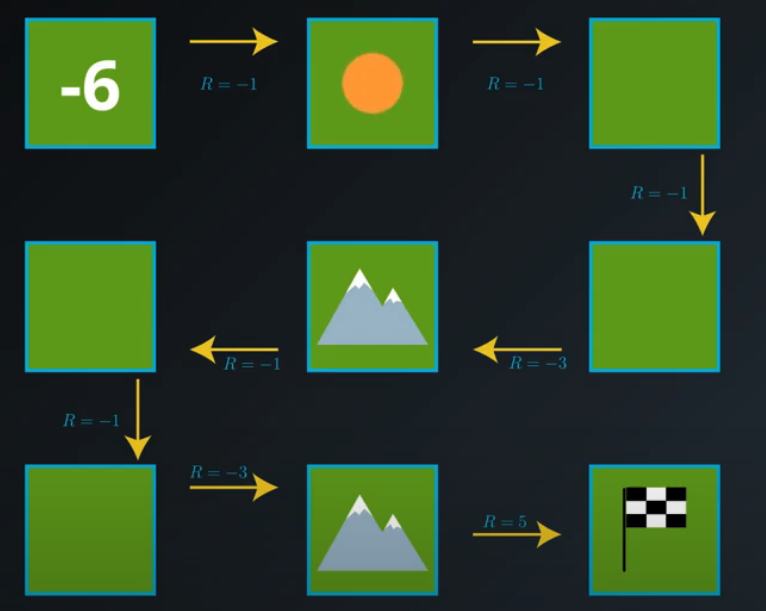
Grid Word images from Udacity nd893
State-Value Functions
The state-value function for a policy is denoted $v_\pi$. For each state $s \in {S}$, it yields the expected return if the agent starts in state $s$ and then uses the policy to choose its actions for all time steps.
- The value of state $s$ under policy $\pi$: $v_{\pi}(s) = \Bbb{E}_{\pi}[G_t|S_t = s]$
Bellman Equations
-
Bellman equations attest to the fact that value functions satisfy recursive relationships.
-
Read More at Chapter 3.5 and 3.6
-
It expresses the value of any state $s$ in terms of the expected immediate reward and the expected value of the next state
- $V_{\pi}(s) = \Bbb{E}_{\pi}[ R_{t+1} + {\gamma}v_{\pi}(S_{t+1}) | S_t) = s] $
-
In the event that the agent’s policy $\pi$ is deterministic, the agent selects action $\pi(s)$ when in state $s$, and the Bellman Expectation Equation can be rewritten as the sum over two variables ($s'$ and $r$):
- $v_{\pi}(s) = \sum_{s'\in{S^{+}}, r \in{R}} p(s', r|s, \pi{s})(r+ \gamma v_{\pi}(s')) $
- In this case, we multiply the sum of the reward and discounted value of the next state $(r+ \gamma v_{\pi}(s')) $ by its corresponding probability $p(s', r|s, \pi{s})$ and sum over all possibilities to yield the expected value.
-
If the agent’s policy $\pi$ is stochastic, the agent selects action $a$ with probability when in state $s$, and the Bellman Expectation Equation can be rewritten as the sum over three variables
- $v_{\pi}(s) = \sum_{s'\in{S^{+}}, r \in{R}, a \in{A_{(s)}}} \pi(a|s) p(s', r|s, a) (\gamma + \gamma v_{\pi}(s')) $
-In this case, we multiply the sum of the reward and discounted value of the next state $(\gamma + \gamma v_{\pi}(s'))$ by its corresponding probability $\pi(a|s) p(s', r|s, a)$ and sum over all possibilities to yield the expected value.
- $v_{\pi}(s) = \sum_{s'\in{S^{+}}, r \in{R}, a \in{A_{(s)}}} \pi(a|s) p(s', r|s, a) (\gamma + \gamma v_{\pi}(s')) $
Action-value Functions
- The action-value function for a policy: $q_{\pi}$.
- The value $q_{\pi}(s,a)$ is the value of taking action $a$ in state $s$ under a policy $\pi$
- For each state $s \in S$ and action $a \in A$, it yields the expected return if the agent starts in state $s$, takes action $a$, and then follows the policy for all future time steps.
- $q_{\pi}(s,a) = \Bbb{E}_{\pi}[G_t |S_t =s, A_t = a ]$
Optimality
- A policy $\pi$ is defined to be better than or equal to a policy $\pi$ if and only if $v_{\pi \prime} (s) \ge v_{\pi} (s)$ for all.
- An optimal policy $\pi_\ast$ satisfies $\pi_\ast \ge \pi$ is guaranteed to exist but may not be unique.
- How do you define better policy?
- Positive reward, which gives agent more motivation
Optimal State-value Function
All optimal policies have the same state-value function $v_\ast$
Optimal Action-value Function
All optimal policies have the same action-value function $q_\ast$
Optimal Policies
- Interaction ${\to}$ $q_\ast$ $\to$ $\pi_\ast$
- Once the agent determines the optimal action-value function $q_\ast$, it can quickly obtain an optimal polity $\pi_ast$ by setting
- $\pi(s) = argmax_{a \in A_{(s)}} q_\ast (s,a)$: Select the maximal actiona value $q$ at each step
Quiz
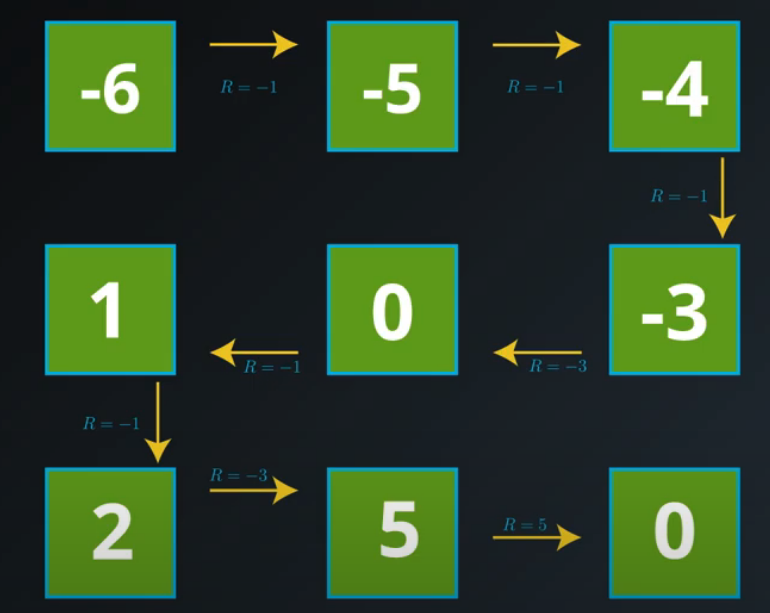
Calculate State-value Function $v_{\pi}$
-
Assuming $\gamma = 1$, calculate $v_{\pi}(s_4)$ and $v_{\pi}(s_1)$
-
Solve the problem using Bellman Equations
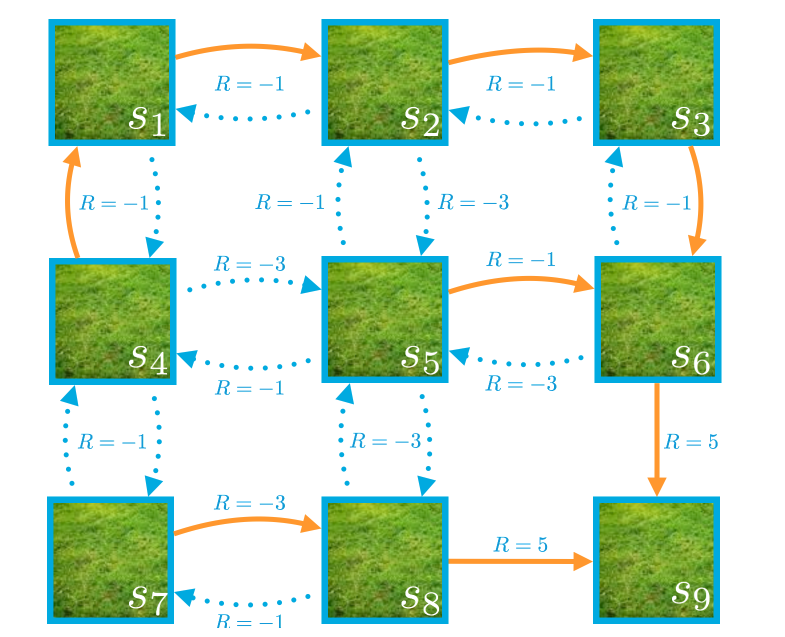
Image from Udacity nd893 -
Answer: $v_{\pi}(s_4) = 1 $ and $v_{\pi}(s_1) = 2$
About Deterministic Policy
True or False?:
For a deterministic policy $\pi$:
$v_{\pi}(s) = q_{\pi}(s,\pi(s)) $ holds for all $s \in S$.
Answer: True.
- It also follows from how we have defined the action-value function.
- The value of the state-action pair $s$, $\pi(s)$ is the expected return if the agent starts in state $s$, takes action $\pi(s)$, and henceforth follows the policy $\pi$.
- In other words, it is the expected return if the agent starts in state $s$, and then follows the policy $\pi$, which is exactly equal to the value of state $s$.
Optimal Policies
Consider a MDP (in the below table), with a corresponding optimal action-value function. Which of the following describes a potential optimal policy that corresponds to the optimal action-value function?
| a1 | a2 | a3 | |
|---|---|---|---|
| s1 | 1 | 3 | 4 |
| s2 | 2 | 2 | 1 |
| s3 | 3 | 1 | 1 |
Answer
-
- State $s1$: the agent will always selects action $a3$
-
- State $s2$: the agent is free to select either $a1$ or $a2$
-
- State $s3$: the agent must select $a1$